
Research Background
I am a Phd student at State Key Laboratory of Robotics and System, Harbin Institute of Technology,(HIT, China) since 2015.
Advised by Prof. Mantian Li .
I obtained my B.S. degree in Mechanical Engineering from Beijing Jiaotong University in 2015.
Research Interests
- I am generally interested in using Optimization, Whole-body Control and Machine Learning techniques to generate complex robot behaviors. My current research focuses on enabling legged robots to traverse complex environments, such as mammals, in a robust and agile manner.
Publications
- Yapeng Shi*, Bin Yu*, Kaixian Ba, Mantian Li. A unified trajectory optimization approach for long-term and reactive motion planning of legged locomotion. Journal of Bionic Engineering, 2023. doi: s42235-023-00362-w (sci, IF=2.682)
- Yapeng Shi, Xiaolong He, Wenpeng Zou, Bin Yu, Lipeng Yuan, Mantian Li, Gang Pan, Kaixian Ba*. Multi-objective optimal torque control with simultaneous motion and force tracking for hydraulic quadruped robots. Machines, 2022, 10(3), 10030170. doi: 10.3390/machines10030170 (sci, IF=2.428)
- Kaixian Ba, Yanhe Song, Chunyu Wang, Yapeng Shi, Bin Yu*, Xin Chen, Guoliang Ma, Xiangdong Kong. A novel kinematics and statics correction algorithm of semi-cylindrical foot end structure for 3-DOF LHDS of legged robots. Complex & Intelligent Systems, 2022, 8(6), 5387-5407. doi: 10.1007/s40747-022-00748-z (sci, IF=5.8)
- Kaixian Ba, Yanhe Song, Yapeng Shi, Chunyu Wang, Guoliang Ma, Yuan Wang, Bin Yu*, Lipeng Yuan. A novel one-dimensional force sensor calibration method to improve the contact force solution accuracy for legged robot. Mechanism and Machine Theory, 2022, 169, 104685. doi: 10.1016/j.mechmachtheory.2021.104685 (sci, IF=3.866)
- Xiaolong He, Yuan Wang, Yapeng Shi, Chenhao Du, Bin Yu*, Qiwei Zhang, Zuojian Xie, Yan Xie, Xuekun Hou. Parameter sensitivity analysis of a brake pressure control system in aviation using an electro-hydraulic servo valve. Electronics 2022, 11(5), 746. doi: 10.3390/electronics11050746 (sci, IF=2.397)
- Yapeng Shi, Mantian Li, Fusheng Zha*, Lining Sun*, Wei Guo, Cong Ma, Zhibin Li. Force-controlled compensation scheme for PQ valve-controlled asymmetric cylinder used on hydraulic quadruped robots. Journal of Bionic Engineering, 2020, 17(6), 1139-1151. doi: 10.1007/s42235-020-0091-7 (sci, IF=2.682)
- Yapeng Shi, Pengfeng Wang, Fusheng Zha*, Lining Sun*, Mantian Li, Wangqiang Jia, Zhibin Li. Mechanical design and force control algorithm for a robot leg with hydraulic series-elastic actuators. International Journal of Advanced Robotic Systems, 2020, 17(3), 1729881420921015. doi: 10.1177/1729881420921015 (sci, IF=1.652)
- Yapeng Shi, Pengfeng Wang, Mantian Li*, Xin Wang*, Zhenyu Jiang, Zhibin Li. Model predictive control for motion planning of quadrupedal locomotion. IEEE International Conference on Advanced Robotics and Mechatronics, Toyonaka, Japan, 2019: 87-92. doi: 10.1109/ICARM.2019.8834241 (3-5 July 2019)
- Pengfei Wang, Yapeng Shi, Fusheng Zha*, Zhenyu Jiang, Xin Wang, Zhibin Li. An analytic solution for the force distribution based on Cartesian compliance models. International Journal of Advanced Robotic Systems, 2019, 16(1), 1729881419827473. doi: 10.1177/1729881419827473 (sci, IF=1.652)
- Yapeng Shi, Pengfei Wang, Xin Wang*, Fusheng Zha, Zhenyu Jiang, Wei Guo, Mantian Li. Bio-inspired equilibrium point control scheme for quadrupedal locomotion. IEEE Transactions on Cognitive and Developmental Systems, 2018, 11(2), 200-209. doi: 10.1109/TCDS.2018.2853597 (sci, IF=3.379)
- ShuaiShuai Wang, Yapeng Shi, Xin Wang*, Zhenyu Jiang, Bin Yu. State estimation for quadrupedal using linear inverted pendulum model. IEEE International Conference on Advanced Robotics and Mechatronics, Hefei, China, 2017: 13-18. doi: 10.1109/ICARM.2017.8273127 (27-31 August 2017)
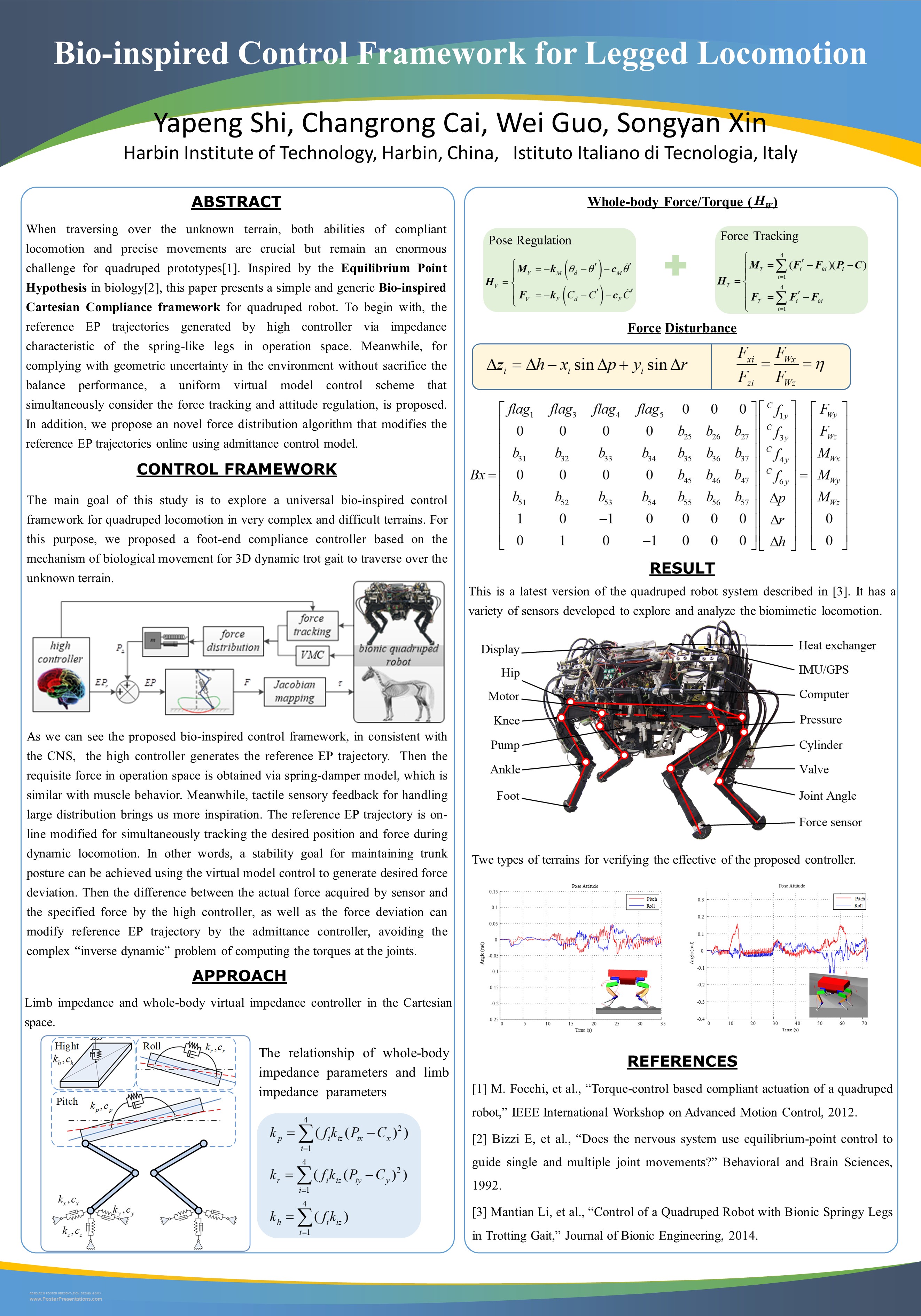
- Yapeng Shi, Changrong Cai, et al.: Bio-inspired Control Framework for Legged Locomotion. Dynamic Walking 2017, Mariehamn, Finland, 4-9 June 2017. Oral Presentation&Poster
{kind=link}
Awards
- Best Conference Paper Award Finalist for paper titled "Model predictive control for motion planning of quadrupedal locomotion", 2019
- HRG Best Advanced Robotics Paper Award for paper titled "State estimation for quadrupedal using linear inverted pendulum model", 2017
- Best Conference Paper Award Finalist for paper titled "State estimation for quadrupedal using linear inverted pendulum model", 2017
- ABU Robocon 2015 Second Prize in China , theme "Robominton-Badminton RoboGame"
- ABU Robocon 2014 Second Prize in China , theme "A Salute for Parenthood"
- ABU Robocon 2013 Third Prize in China , theme "The Green Planet"
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Experience
- 2019.09 - 2020.09: PhD visiting student at
AIR Lab,
University of Edinburgh (UoE), UK
worked with Dr. Zhibin Li . Mainly focuse on Optimization-based Planning and Whole-body Force Control. - 2017.03 - 2018.10: Research Assistant
at Robotics Lab, Shenzhen Academy of Aerospace Technology
worked on Quadruped Locomotion. - 2016.07 - 2017.02: Intern at Department of Computer Science,
Long-HIT Inc.
focused on robots R&D.
Patents
- 足式机器人长时域与反应性相结合的运动轨迹生成方法, CN 202310055604.5. Link(1/7)
- 基于足端与液压驱动单元等效刚度阻尼映射的控制方法, CN 202211604364.1. Link(1/10)
- 一种能适应不同刚度地面的液压腿SLIP模型变刚度控制方法, CN 202211604363.7. Link(1/10)
- 四足机器人行走与对角步态运动控制方法, CN 202211034456.0. Link(1/10)
- 电机和气泵混合驱动的搬运装置, ZL 202210639424.7. Link(1/7)
- 电机和气泵混合驱动的机械手, CN 202210260395.3. Link(1/7)
- 用于带刺作物的便携式采摘收集装置及其采摘收集方法, ZL 202210575528.6. Link(1/7)
- 多形态变换爪足机构, ZL 202210260398.7. Link(1/7)
- 四足机器人着地足力分配方法、装置、终端及计算机可读存储介质, ZL 201910012062.7. Link(1/7)
- 液压缸对顶实验装置, ZL 201821813280.8. Link(1/1)
- 一种足式运载机器人, CN 2023102032627. 申请日期: 2023-03-01; (2/8)
- 一种功率补充电路, CN 202211656424.4. 申请日期: 2022-12-22; (2/7)
- 一种抬升机构, CN 2023103532254. 申请日期: 2023-04-05; (2/8)
- 一种机器人电机驱动液压动力系统及控制方法, ZL 201611093517.5. Link(2/3)
- 一种机器人电机驱动液压动力系统, ZL 201621304906.3. Link(2/3)
- 液压泵的流体压力脉动抑制方法, ZL 202210896722.4. Link(3/8)
- 四足机器人用轻量化液压油源, ZL 202210872450.4. Link(8/9)
- 基于纳米摩擦电的自供电位置传感器, ZL 202210750057.8. Link(7/8)
- 三通比例减压阀死区及滞环补偿方法, ZL 202210575534.1. Link(7/7)
- 泵阀集成流控模块, ZL 201821826412.0. Link(7/7)
- 泵阀复合控制系统及方法, ZL 201811307755.0. Link(7/7)
- 承载立柱与悬臂装置, ZL 201710777588.5. Link(9/9)
- 承载立柱与悬臂装置, ZL 201721119345.4. Link(9/9)
Technical Skills
- Programming: ROS, Matlab, C/C++, Python, LaTeX
- Skill: SolidWorks, Docker, ADAMS